仿生,是製造機器人的理想標準。中國科學技術大學(以下簡稱中國科大)近日發表新作品──新型螺旋軟體機器人,它的動作靈巧度、精細度及速度等可比擬生物體。
據中新網報導,在安徽合肥的中國科學技術大學,由尼克(Nikolaos Freris)特任教授課題組及其合作者特任副研究員魏熹在軟體機器人領域取得重要進展的成果——研發了一類新型螺旋軟體機器人。
科研團隊負責人尼克24日受訪時說:「這款螺旋機器人可以像章魚手或者像象鼻一樣從末端開始捲曲,能360度自由彎曲或扭轉。」,「它能牢牢抓住一根5公分粗的資料線,也可以提起重達自身重量260倍的10公斤啞鈴」。
中國科大研究人員表示,軟體機器人憑藉自身的安全性和靈活性而備受矚目,是機器人領域的前沿研究課題。然而,現有的軟體機器人在靈巧性、運動速度、協作交互等關鍵性能方面,仍然與自然界生物的柔性肢體間存在較大差距。
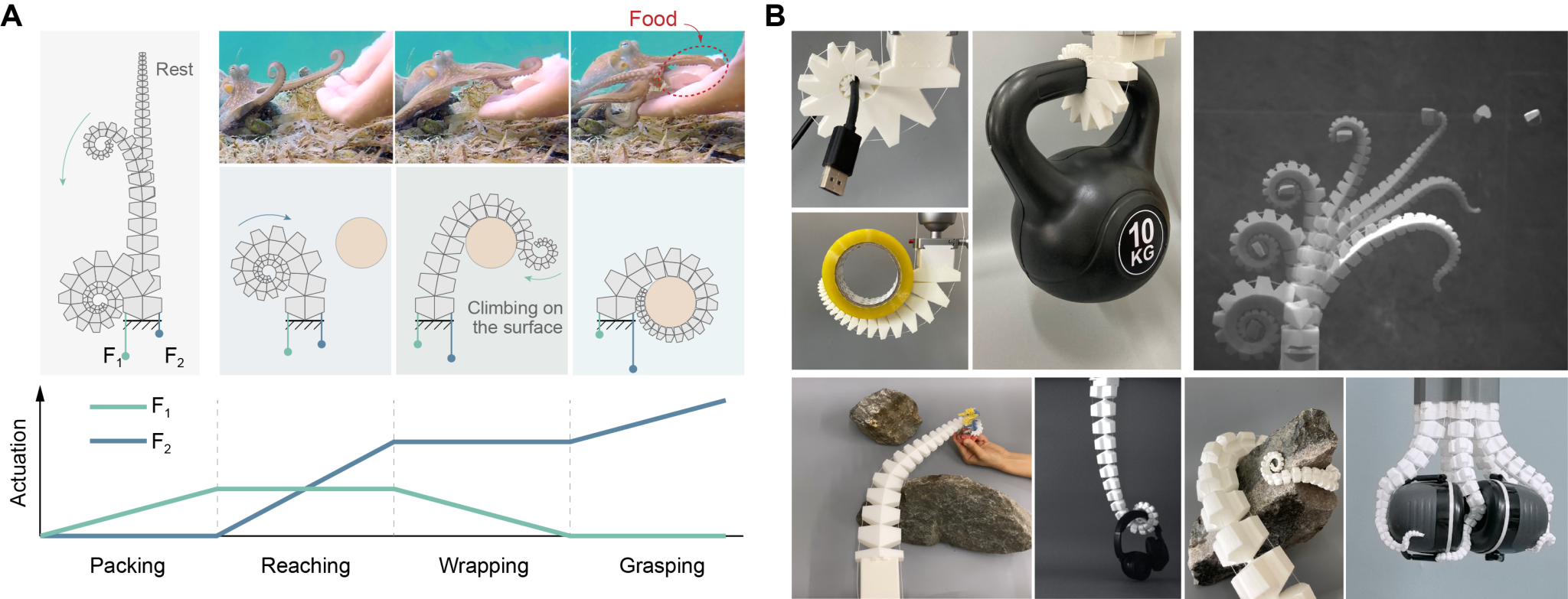
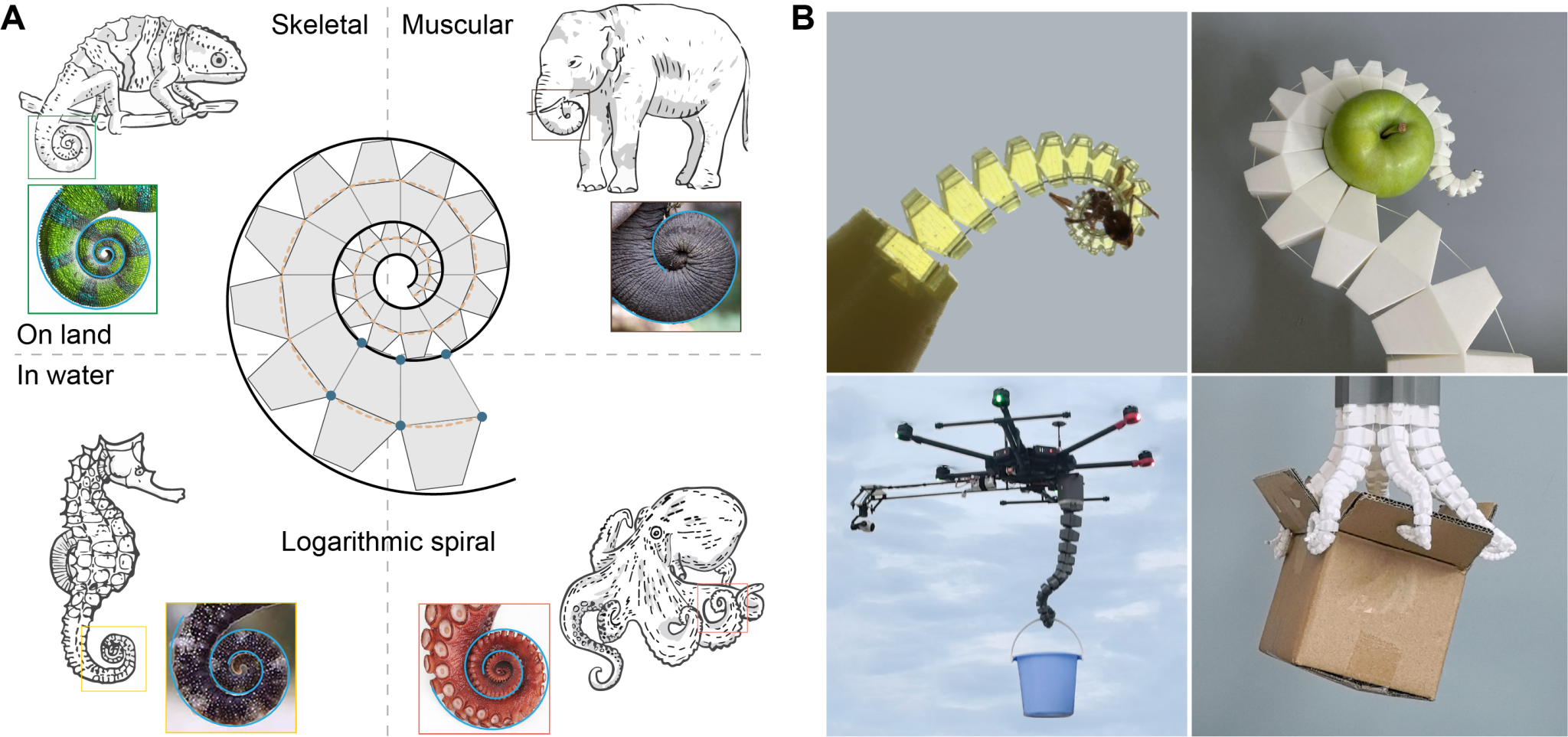
A圖螺旋機器人為仿生操作策略。B圖為螺旋機器人在多角度和多場景中執行複雜抓取和操作任務的展示。圖/取自中國科學技術大學
研究人員對於自然界中多種生物柔性肢體(象鼻、章魚觸手、海馬和變色龍尾巴等)形態和運動的系統進行觀察和數學模型抽象,首次提出基於對數螺旋線結構的新型螺旋軟體機器人。
在此基礎上,研究團隊還設計了不同尺度的機器人。中新網訪問團隊成員王展翅,他舉例說明新型螺旋軟體機器人的靈巧:「例如微型螺旋機器人總長度為10公分,尖端直徑僅為0.14公分,可以無損地抓住活動的螞蟻;大型螺旋機器人長度可達1公尺,可以在1秒內抓取桌上指定位置的耳機」。
據魏熹介紹,新研究技術有望推進軟體機器人的發展,為複雜抓取任務、人機交互、低空經濟產業等應用場景提供強大的技術支援。